The mooring drone is a UAV system that combines a drone and a tethered integrated cable. The mooring system is divided into ground fixed, vehicle-mounted and ship-borne mobile depending on the application scenario. Three working methods are very good to meet the needs of various work environments. However, there are still several core technical issues that have not yet been resolved.
The market demand for tethered rotor drones comes from the mooring balloon lift platform system.
The tethered balloon lift platform system is an air-based platform for fixed-point monitoring of electronic equipment. TCOM Corporation of the United States is a well-known manufacturer of the tethered balloon system. The sea-alert radar network on the west coast of the United States is deployed by the TCOM captive balloon as an air-based platform.

However, the tethered balloon is bulky and difficult to lift, and the mobility adaptability is very poor. The industry has been conducting research on the system of the tethered lift platform by inductively powering the ground from the ground and using a motor-driven propeller instead of a balloon as the lift-off power. However, the rare earth motor has yet to be developed in the last century. The weight of the motor itself is too heavy, and the weight-to-weight ratio is insufficient to support the development and application of the tethered rotor system.
In recent years, the rapid development of multi-rotor UAVs has provided technical support for the realization of the tethered rotor lift platform system. Many UAV manufacturers have also developed the tethered rotor system, called the tethered rotor. machine.

Talk about the technical difficulties of the mooring rotor drone:
1. The power-to-weight ratio of the drive motor.
The power-to-weight ratio is the ratio of the motor output power to the weight of the motor itself, in kilowatts/kg. According to the empirical value of the rotor/power ratio of the rotor type aircraft, about 5 to 10 kilograms of lift per kilowatt of power is generated. It is more difficult to design the system than the power-to-weight ratio of the motor is less than 1 kilowatt/kg.
It is emphasized here that motor power refers to rated power, not maximum power; motor weight includes motor and ESC and cooling equipment for its normal operation. The tethered rotor must be continuously operated for a long time. Unlike the multi-rotor UAV, which can work intermittently for a short period of time, the drive motor is the core component of the power and must work within the rated power range.
2. High voltage power supply system.
The biggest difference between a tethered rotor and a multi-rotor drone is the way it is powered. Power supply from the ground-facing tethered rotor platform must pass a certain transmission distance. The high-voltage power supply method can reduce the transmission current, thereby reducing the power loss, and at the same time reducing the cross-sectional area of ​​the transmission wire and reducing the weight of the power cable.
High-voltage power supply is not the higher the voltage, but it should be considered according to the actual system requirements. One way is that the transmission voltage can directly match the high-voltage motor, and the voltage does not need to be converted to directly drive the motor, and the structure is relatively simple. However, the design of the high-voltage motor in this way is limited by the high-power high-voltage control device of the motor ESC, especially in terms of cost. Another way is to design a switching power supply for step-down on the platform, which is driven by a multi-rotor existing low-voltage motor; however, the switching power supply also has the requirement of the power-to-weight ratio and the constraints of the high-power high-voltage control device, and it also has to pay a price. of.
3. Tethered tethers.
In addition to transmitting power, the tether is also designed with optical fibers to transmit the electrical signals of the platform-carrying electronics, so the tether is a power/signal composite cable.
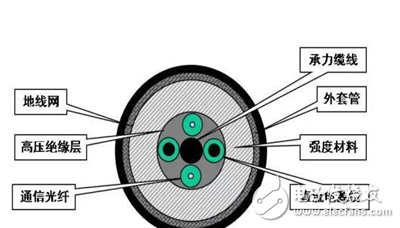
In order to reduce the weight of the lifting equipment, the platform-mounted electronic equipment generally places the antenna and the equipment outside the transmitter on the ground, and the electronic signal connection between the platform and the ground equipment is secured by the tethered fiber. This saves platform lift, increases lift height, and increases lift gain.
The tether itself also needs to reduce the weight. At present, the alloy aluminum material can be used as the power wire, which is lighter than the copper wire.
4. Flight control function.
The tethered rotor platform is mainly hovering around the fixed point without excessively complicated flight movements. This seems to be simpler than the multi-rotor flight control, which is not the case. The flight control of the tethered rotor needs to fully consider the impact of the tether on its flight, especially under various wind conditions, the oscillation of the tether with the wind will cause the platform to lose control.
The civilian tethered rotorless drone must meet at least the requirements of the constant wind 6 gust 8 to have practical significance. In the wind field of 6-8, there is no fixed motion law of the tether. It is difficult to adjust by the robustness of the flight control to the control of the rotor platform. The difficulty is very large.
5. Aerodynamic design of the rotor platform.
Considering that the system rotor platform is to be operated in a strong wind field, the aerodynamic design of the platform is particularly important. The system rotor platform hovering in the wind field is actually equivalent to the plane flying in the direction of the wind. The 6-8 wind speed is 10.8-20.7 m/s, which is equivalent to the rotor platform having a maximum speed of not less than 75 km.
To achieve such a speed, the aerodynamic design of the fixed wing is more reasonable. Recently, a vertical take-off and landing fixed-wing UAV has evolved. In fact, it is a simple combination of two sets of multi-rotor + fixed-wing power systems. It is not economical from the benefit of the drone itself, but it can solve the fixed-wing take-off and landing of specific occasions. problem.

The aerodynamic design of the vertical take-off and landing fixed wing has a great advantage in the system rotor. The tethered rotor is powered by the ground and the energy is sufficient; the two sets of power systems have their own uses in the strong wind field, and the vertical power system maintains the platform hovering attitude. The horizontal power system allows the platform to fly against the wind; the fixed wing shape can generate lift for the platform, reducing the burden on the vertical power system.
The tethered rotor drone has already faced a wide range of applications, but there are still some distances from being able to use it to practical use, and it is expected that the industry peers will work together to innovate.
Stator Core welding is a important process for stator core assembly. We are able to use TIG, MIG, LASER weld to meet different requirement for customers. The stator core is an important part of the stator and the main component of the magnetic circuit of the motor. Different sizes of stator cores have different technological processes and application fields. For example, small-sized stator cores are usually assembled by interlocking, and the outer diameter is usually less than 200mm. Large-sized stators are assembled in different ways depending on the motor design, such as stator core by cleating and staor core by welding.
Stator Core By Welding,Stator Iron Core,Bldc Stator Core,Laminated Stator Core
Henan Yongrong Power Technology Co., Ltd , https://www.hnyongrongglobal.com