1 Introduction
This article refers to the address: http://
With the development of the economy, the transportation industry is becoming more and more prosperous. However, due to the difficulty in keeping up with the road conditions and traffic management hardware, and the subjective principles of driving overtaking, driving out of the gap, and incorrectly estimating the distance between vehicles, the traffic accidents that collide with each other frequently occur. occur. The fundamental measure to solve this problem is to install a device that can automatically track the distance of the moving car and automatically brake within a dangerous distance.
Due to the development of electronic technology, laser ranging, microwave radar ranging, ultrasonic ranging and infrared ranging have appeared. The laser ranging is to detect the distance between the two vehicles by the laser beam reflected from the mirror (the tail of the car) irradiated by the laser beam on the preceding vehicle. Due to the bad weather, the intense vibration of the car, the wear of the mirror surface, pollution and other factors, the detection distance of the reflected laser beam at a certain power is reduced by 1/2 to 1/3 of the maximum distance that can be detected, and the loss is very large. , affecting the accuracy of detection; microwave radar ranging technology for the military and some industrial development equipment and oscillators and other circuit parts are expensive, and now almost no development of the civilian market; ultrasonic ranging has been studied at home and abroad Due to the special price of special special components, it is difficult to promote; infrared as a special light wave, has the basic physical transmission characteristics of light waves - reflection, refraction, scattering, etc., and because its technical difficulty is relatively small, the composition of the measurement It is cheaper from the system and has excellent performance, which is convenient for civilian promotion.
The basic principles of ranging used in current ranging systems are based on the measurement time difference, while the methods of measuring time mainly include "pulse mode" and "frequency modulation 2 continuous wave mode". Both of these measurement methods are implemented by analog circuits, which greatly reduce the measurement accuracy due to the influence of the device delay. In this paper, the "counting" method is adopted, and the measurement accuracy is greatly improved by the single chip processing.
Therefore, the infrared ranging system studied in this paper has lower cost and small size, and it uses a new ranging principle combined with the processing of single-chip technology to improve the measurement accuracy. At the same time, the ranging system is applied to In the car collision avoidance system, the vehicle collision avoidance test was carried out. On the surface of the test results, the distance that the system can detect is greater than 40m, and the analysis and judgment of the dangerous situation is fast and the accuracy is high.
2 The basic principle of infrared ranging and the establishment of its system
2.1 Basic principles
The infrared emitter continuously emits infrared light with a frequency of 40 kHz, and is reflected by the obstacle, and the infrared receiver receives the reflected wave signal and converts it into an electrical signal. The distance s is obtained by measuring the time difference t between the transmitted wave and the received reflected wave:

Where c is the speed of light, generally 3 x 108 m/s.
In this paper, the "counting" method is adopted to measure by single chip processing. The basic principle is that the infrared emitter is always in the state of emitting infrared rays. When the infrared receiver receives the infrared light reflected back by the obstacle for the first time, it is processed by the circuit. A counting start signal is output, and the counter of the single chip microcomputer starts counting at a certain frequency; when the infrared receiving device receives the reflected infrared light for the second time, the circuit processing microcontroller gives a stop counting pulse, and the counter stops counting. Through programming, the MCU automatically processes, multiplying the pulse period T by the pulse number n to obtain the time difference t from the emission of infrared rays to the reception of infrared rays, namely:
![]()
(2) The formula is substituted into (1) to measure the distance.
2.2 System establishment
According to the above ranging principle, the basic block diagram of the system is designed as shown in Fig. 1.
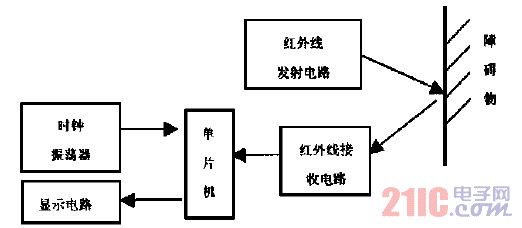
Figure 1 Basic block diagram of infrared ranging system
The infrared transmitting circuit emits infrared light at a frequency of 40 kHz. When an infrared light is diffused and reflected by an obstacle, the infrared receiving circuit receives a reflected infrared light for the first time, and sends a signal pulse to the single chip microcomputer to start the counter in the single chip, and the counter is set to enter the counting. State; when the receiving circuit receives the infrared light of the reflector for the second time, a signal pulse is given by the single chip processing, so that the counter stops counting, the data is latched, and then processed by the single chip microcomputer, and the measured distance is displayed on the display.
3 Infrared ranging in the application of car collision avoidance system
3.1 Basic features
The automotive infrared anti-collision system studied in this paper absorbs some characteristics of various rangefinders at home and abroad, and is designed based on the development direction of China's automotive electronics industry and existing electronic technology. It has the following characteristics:
1) The car can automatically track the distance of the obstacle during the running;
2) The distance between the workshops of highways with large traffic volume is generally 30~50m, and the limit safety distance of the device is 30m. When the detected vehicle spacing is 30m, a warning sound is issued to remind the driver to pay attention to the brakes;
3) When the detected car spacing is 20m, the automatic brake signal is given; if the automatic brake device is installed, the automatic brake decelerates.
3.2 Automotive Infrared Collision Avoidance System
The circuit block diagram of the car infrared collision avoidance system is shown in Figure 2.
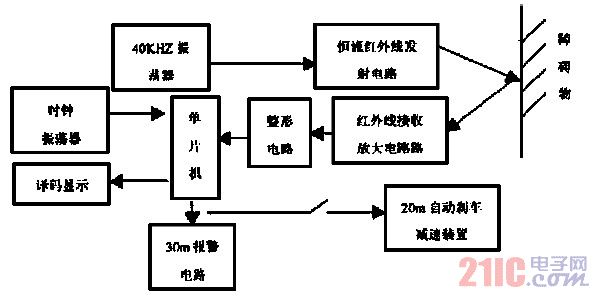
Figure 2 Circuit block diagram of the car infrared collision avoidance system
The system consists of a transmitting part, a receiving part, a single chip microcomputer, a decoding display circuit, an alarm part and an automatic brake speed reducing device.
The transmitting part is composed of a 40 kHz oscillator, a constant current transmitting and transmitting probe, etc. The oscillator generates a narrow pulse with a very small duty ratio, and a constant current source is used to supply a current of about 20 mA, thereby reducing power consumption and improving The power is transmitted, and finally the infrared is focused by the transmitting probe to emit at a scattering angle of less than 2°.
Receiving part: consisting of an infrared receiving head, a first-stage amplifying circuit, a second-stage amplifying circuit, shaping, AGC control gain and the like, and the infrared receiving head receives the signal and is amplified by the first-stage and second-stage amplifying circuits by Schmidt The special trigger circuit is shaped and sent to the MCU for processing. The AGC controls the gain of the receiving circuit to ensure constant amplitude output.
The single chip microcomputer is composed of a clock oscillator and a single chip microcomputer. After programming, the single chip realizes automatic counting, calculates the time t and the measuring distance s, and continuously outputs the measuring distance to the display device, and generates an alarm signal and a car spacing when the distance of the workshop is 30 m. At 20m, an automatic brake deceleration signal is generated.
Decoding display circuit: consists of a decoding circuit and a display. The distance signal output by the single chip is decoded by the decoder and displayed through the display.
The distance between the car and the obstacle can be dynamically displayed.
Alarm part: It consists of a trigger, a drive circuit and a small speaker. When the distance between the cars is 30m, the MCU gives a trigger to a signal, so that the trigger is set to generate a set of pulses. Through the drive circuit, the small speaker emits an alarm sound. When it is greater than 30m, the trigger is reset and the pulse is stopped.
Automatic brake deceleration device: It consists of switch K and automatic brake deceleration device. When the driver thinks it is necessary to use the automatic brake deceleration device, the switch K is closed. When the distance between the cars is less than 20m, the MCU provides a signal to activate the automatic brake deceleration device to prevent collision.
4 Performance evaluation of automotive infrared collision avoidance system
In order to evaluate the performance of the car's infrared anti-collision system, including the detection of obstacle distance and relative speed performance, two tests were performed using still-distance distance detection and dynamic detection while driving on the highway.
4.1 Still life distance detection test
The ordinary car was placed in front of the test car equipped with an infrared anti-collision system, and the test car was driven to the ordinary car at a speed of 30 km/h from a distance of 100 m. When the distance is greater than 40m, the display 0; when the distance is less than 40m, the data displayed by the display changes continuously; when the distance is 30m, the alarm starts to alarm. The experimental results show that the actual workshop distance is met and the detection results are accurate. The experimental results are shown in Figure 3.
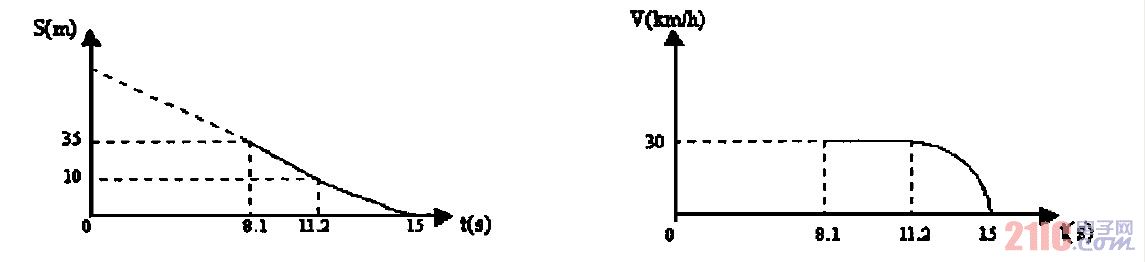
Figure 3 Still life distance detection experiment results
4.2 Driving dynamic test on the expressway
The test car and the ordinary car travel in the same direction on the highway at the same time, and the two cars maintain a distance of 100m before driving. The test vehicle emits infrared rays to ordinary cars, and detects the two distances and relative speeds. The experimental results are shown in Fig. 4.
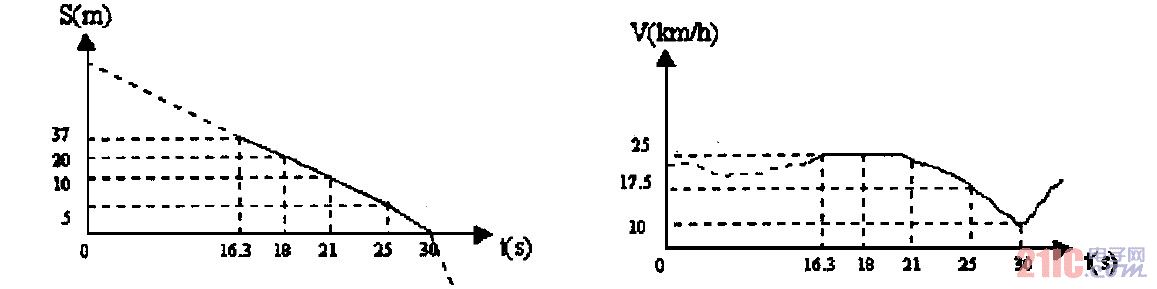
Figure 4 Dynamic experimental results on the highway
5 Conclusion
In this paper, an infrared ranging system is established by using a new ranging principle, and the application of infrared ranging system in automobile collision avoidance system is studied.
In order to make the time difference t of the measurement accurate, two methods are used to improve the accuracy:
1) The period T of the counting pulse should be made very small. On the order of microseconds;
2) Counting the count pulses of the N received infrared periods, and calculating the time difference t by the formula t=nT/N, the accuracy is increased to about N times.
Of course, in order to make the automotive infrared collision avoidance system practical, the following problems need to be solved:
1) How to prevent the illusion of vehicles on the roadside due to the objects on both sides of the road when driving on the bypass road;
2) The anti-vibration capability of the single-chip microcomputer is poor, which affects the reliability of the work;
3) What kind of warning signal is issued to make the driver not cause nervousness;
4) How to further improve the working frequency of the single chip counting and reduce the error;
5) The detection distance is affected by bad weather, and the infrared loss is large;
6) The dynamic detection range needs to be further improved.
These issues need further study and discussion. It is believed that these problems will be satisfactorily resolved as the device improves and the experimental conditions improve.
In short, the system has a low cost, high precision, many functions, and a broad market.
Easy Electronic Technology Co.,Ltd , https://www.yxpcelectronicgroups.com